TODO: Put Abstract here!
TODO: Put IVLMap Creation Content here!
TODO: Put Localizing Open-Vocabulary Landmarks Content here!
TODO: Put Zero-Shot Instance Level Object Goal Navigation from Natural Language Content here!
We created an Interactive Dataset Collection Scheme by combining the cmu-exploration development environment with the Habitat simulator. This involves integrating cmu-exploration's autonomous exploration with Habitat robot agents for a unified dataset collection approach.
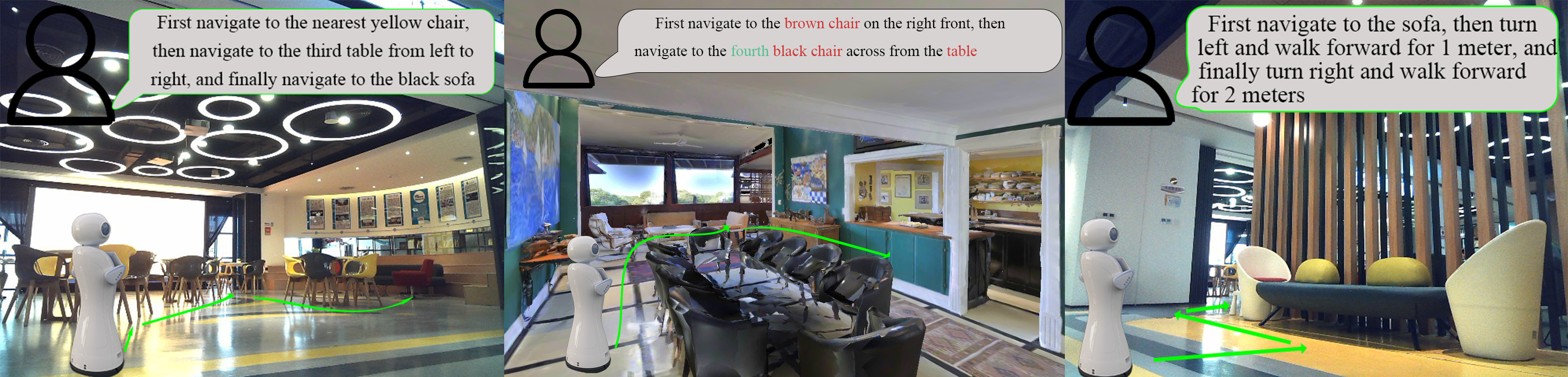
TODO: Put Multi-Object Navigation with given subgoals Content here!
TODO: Put Zero-Shot Instance Level Object Goal Navigation from Natural Language Content here!